高精定位是實現高級輔助駕駛和自動駕駛應用的必要條件之一。車輛要實現L2+ 的自動駕駛體驗,就需要根據不同的應用場景、不同的精度要求和不同的功能安全等級,來選擇系統所搭載的硬件類型。
在高精定位的應用中,有兩種關鍵的定位方案相輔相成:
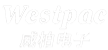
一是通過環境感知傳感器,如激光雷達和攝像頭采集環境信息,結合高精特征地圖來實現定位功能。這使得車輛在城市道路中能規劃最合適的路徑,精準避障。
二是通過GNSS(全球導航衛星系統)實時獲取衛星信號,再結合RTK(實時差分定位)服務進行誤差補償校準來進行空曠路段高速行駛的導航。
但這兩種實現方式都有其不足之處:激光雷達和攝像頭采集的環境信息會受天氣和遮擋物的影響;GNSS系統在隧道、高層密集樓宇這些衛星信號不能覆蓋的地方就不能獲得精確的車輛定位信息。
但慣性測量單元IMU(inertial measurement unit)技術的發展逐漸彌補了激光雷達、攝像頭、GNSS系統的不足。
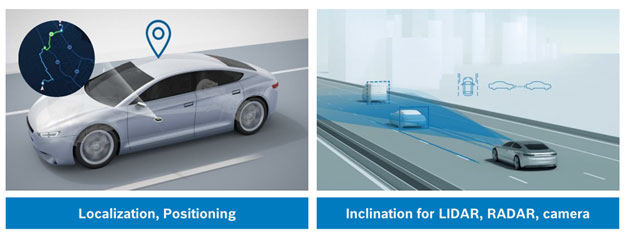
IMU 的核心零部件為陀螺儀和加速度計。陀螺儀用以獲取運動體的角速度并測量其角度變化,加速度計用以獲取運動體的線性加速度并測量其速度變化。慣性導航解算軟件通過積分運算、姿態矩陣計算等方法,計算出地理坐標系下運載體的速度、位置和姿態。
作為慣性導航系統INS(inertial navigation system)中的核心器件,IMU不受外界環境的影響,根據慣性數據為現有技術提供關鍵的數據補充,使得系統高精組合導航得以實現。
博世全新高精度慣性測量單元SMI240使用小型LGA封裝 3.3 x 3.3 x 1.1 mm,內部集成三軸陀螺儀和三軸加速度計,符合車規級AEC-Q100 Grade2,為系統提供高精度和高可靠性的慣性測量數據。
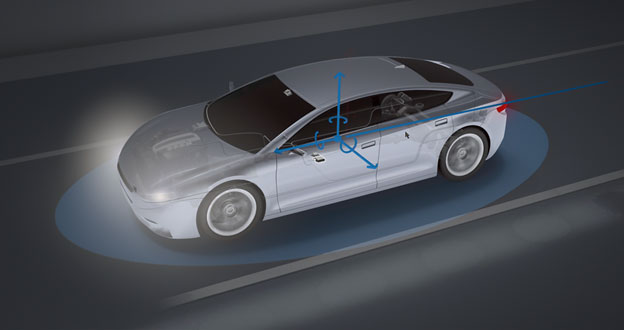
SMI240 主要參數
博世SMI240完全按照ISO26262:2018 標準開發,內部集成功能安全控制器(SCON),可對芯片近100個內部信號進行實時監控并提供16位數據長度的加速度和角速度信號,適用于系統滿足ASIL-B等級功能安全要求的L2+的自動駕駛等應用。

功能安全數據
SMI240集高性能和高集成度于一體,不僅能實現6軸慣性測量,還完美實現了低噪聲和高穩定性的統一:陀螺儀噪聲控制在± 0.1 °/s、加速度計噪聲低至± 4mg的同時,Allan 方差指標陀螺儀 < 5 °/h、加速度計 50 ug,再車輛運行中始終能保持精確穩定的數據輸出。
博世一直以來都是MEMS傳感器技術的引領者,在MEMS領域擁有突破性的“博世工藝”和1000多項專利及專利申請。憑借領先的MEMS技術和深厚的整車系統經驗,博世致力于為客戶提供高性能、高質量的產品和專業的服務支持。